Blog
Filter by category:
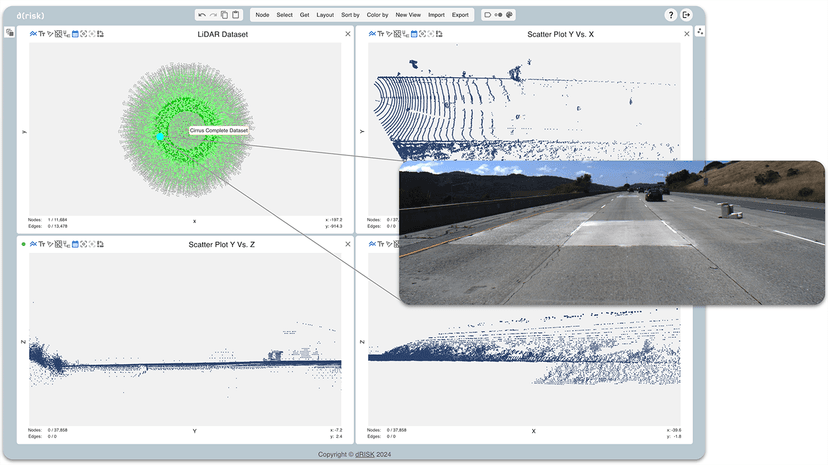
Using Edge to navigate LiDAR Data: from the surface to the bottom in minutes
7th Mar 2024
By Federico Arenas Lopez and Katarina Cimesa Assessing the surface: Introduction LiDAR-based perception plays an increasingly important role in deploying safe Autonomous Vehicles and ADAS systems. In this short blog, we will illustrate how dRISK Edge can help LiDAR developers analyze the performance of their sensors under challenging circumstances, all in a matter… Continue reading Using Edge to navigate LiDAR Data: from the surface to the bottom in minutes
Everything your parents didn’t tell you about AV and ADAS needs, from Level 2 to Level 5.
19th Sep 2023
By Kiran Jesudasan Autonomous Vehicles are inherently complex, and their data requirements are multifaceted. For the purpose of this blog article, our focus will be on the evolving regulatory landscape of testing. We will delve into the history of regulatory testing, highlight key changes projected for the industry, and demonstrate how dRISK aligns directly… Continue reading Everything your parents didn’t tell you about AV and ADAS needs, from Level 2 to Level 5.

Edge Case of the Week: Red Lights
23rd Aug 2023
For the “Edge Case of the Week” dRISK would like to nominate a class of events that shouldn’t be edge cases at all. Red lights. Surely, stopping at red lights should be among the first tasks any driver learns, whether human or autonomous. You’d think red lights would be trivial for AI. After all,… Continue reading Edge Case of the Week: Red Lights

Whack All Your Moles at Once: Addressing Hidden Safety Flaws in Autonomous Vehicles
12th Jul 2023
By Lorenzo Niccolini and Hamish Scott The reason we still don’t have ubiquitous AVs is that dealing with the tail-end complexities of the real world turns out to be really hard. A manifestation of this is the ‘whack-a-mole’ problem: you – an AV/ADAS developer – encounter a problem with the vehicle’s performance on… Continue reading Whack All Your Moles at Once: Addressing Hidden Safety Flaws in Autonomous Vehicles
The Self-driving Crucible
27th Feb 2023
Chess Stetson has published his thoughts on the current state of the Autonomous vehicle industry which seems like it is at a low point in the hype cycle just now. However, it is not all bad news as Chess and the dRISK team believe that if the autonomy goals changed from incremental improvements on normal… Continue reading The Self-driving Crucible

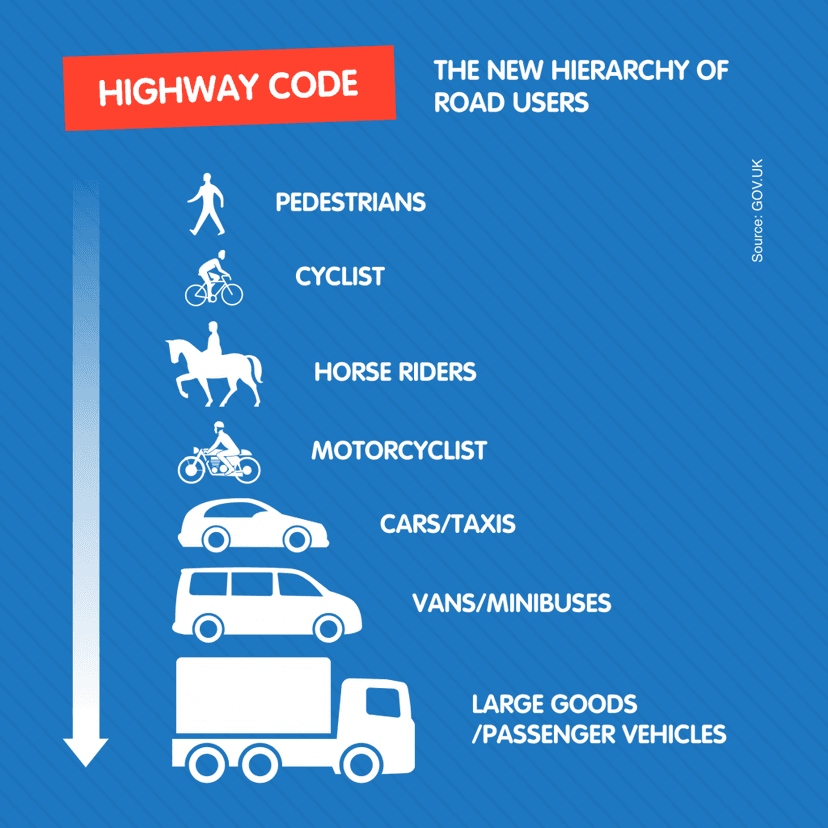
Developing autonomous vehicles requires planning for the unexpected …
27th Jun 2022
…including changes to the Highway Code. Kiran Jesudasan, Transportation Systems Specialist at dRISK, explains why developers need to change their assumptions if AVs are ever to be commercially deployed at scale. On 29th January 2022, changes were introduced to the Highway Code following public consultation. In essence, a new hierarchy of road users has been… Continue reading Developing autonomous vehicles requires planning for the unexpected …
Can an Autonomous Vehicle handle a storm?
1st Apr 2022
Storms often provide a test for British infrastructure and the early months of 2022 saw Storm Eunice, swiftly followed by Franklin, give the sternest of examinations. Sadly the UK transport infrastructure weakness in such an environment was exposed with more pressure being put on the UK roads as commuters would turn to cars to get… Continue reading Can an Autonomous Vehicle handle a storm?
